En el ámbito de la robótico, la cinemática inversa, es la técnica que determina el movimiento articulatorio que permite obtener la posición concreta de un actuador final. La cinemática inversa posee un problema de cálculo complejo que requiere la resolución de diversas 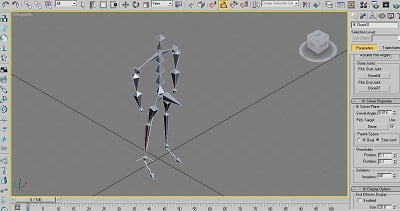 ecuaciones, y cuyo resultado no es único.
ecuaciones, y cuyo resultado no es único.
El objetivo de esta técnica, es la de hallar valores que deben tomar coordenadas de las articulaciones robóticas, para que su extremo se oriente y posicione en base a una localización en el espacio.
La cinemática inversa posee movimientos modelados a través de ecuaciones cinemáticas de la misma cadena, por lo que estas ecuaciones son las que determinan la configuración de esta cadena y sus parámetros.
Artículos relacionados

La rosa ocupa un lugar importante en la industria de...

Dentro de las artes plásticas hay numerosas expresiones que son...
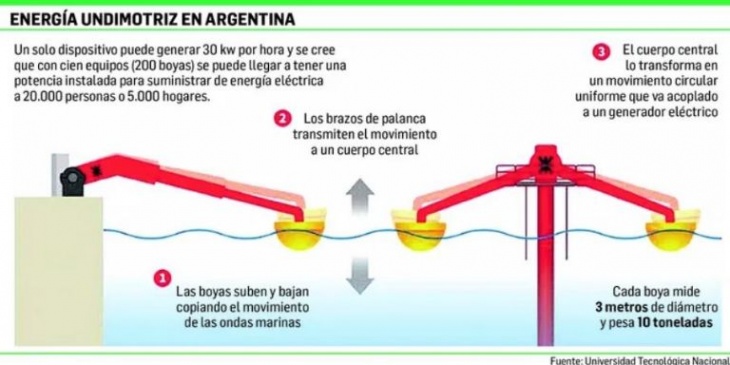
Una planta de energía undimotriz es una obra de ingeniería...

Qué son las plantas ornamentales
Las plantas ornamentales se seleccionan por...

La Biblioteca Maya Somaiya en Kopargaon, India fue diseñada por...
