En el ámbito de la robótico, la cinemática inversa, es la técnica que determina el movimiento articulatorio que permite obtener la posición concreta de un actuador final. La cinemática inversa posee un problema de cálculo complejo que requiere la resolución de diversas  ecuaciones, y cuyo resultado no es único.
ecuaciones, y cuyo resultado no es único.
El objetivo de esta técnica, es la de hallar valores que deben tomar coordenadas de las articulaciones robóticas, para que su extremo se oriente y posicione en base a una localización en el espacio.
La cinemática inversa posee movimientos modelados a través de ecuaciones cinemáticas de la misma cadena, por lo que estas ecuaciones son las que determinan la configuración de esta cadena y sus parámetros.
Artículos relacionados
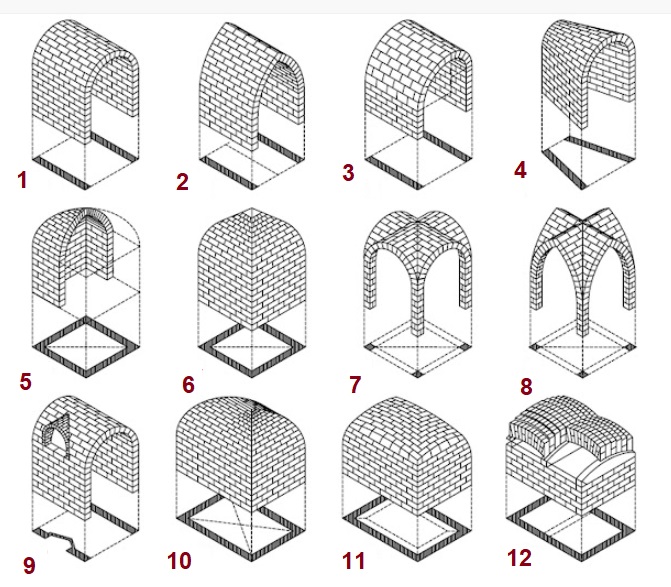
Una bóveda es una forma estructural compuesta por una serie...
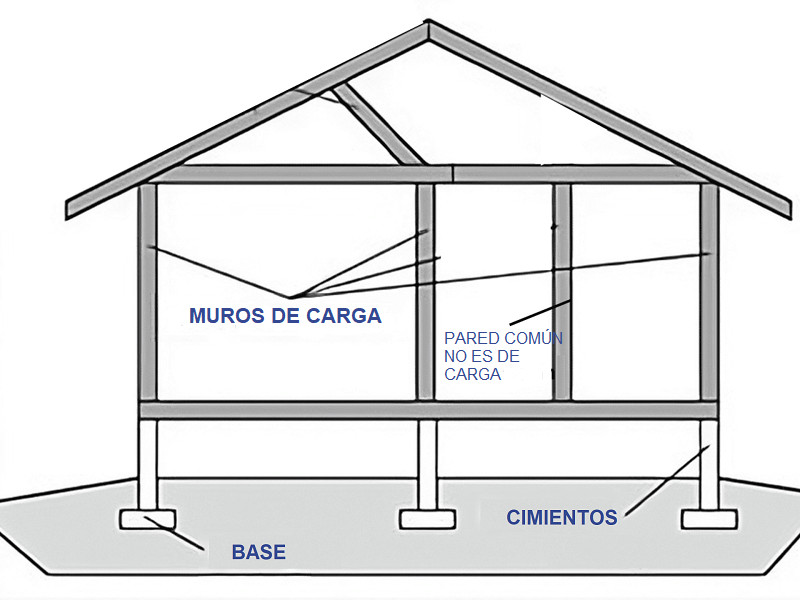
Un muro de carga es un componente estructural crucial en...
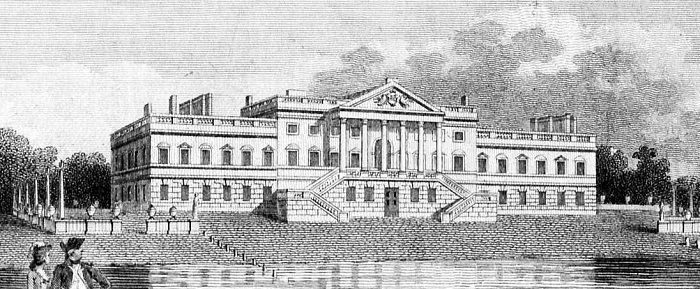
La era georgiana, que abarcó de 1714 a 1830, marcó...

En la industria de la construcción se denomina estructura edilicia...

La Cúpula en la Arquitectura: Innovación, Diseño y Simbolismo
Desde los...